Электрические
| Питание |
12/24VDC - 5W |
| GP I/O & PWM |
Уровень питания VDC – 0.2A (всего) |
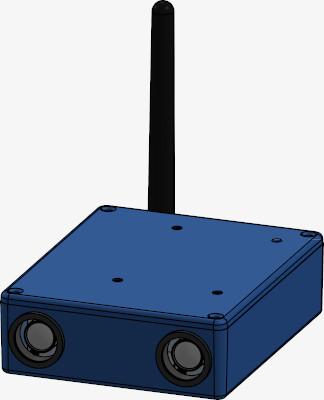
Камера
| Разрешение (RGB Bayer) |
1600x1300 Моно / 3200x1300 Стерео |
| Тип затвора |
Глобальный затвор и синхронизация между сенсорами |
| FPS |
60 (макс.) |
| Объектив / Крепление / Фокус |
2.8мм (по умолчанию) … 25мм / S-крепление / Ручной |
| База |
65mm |
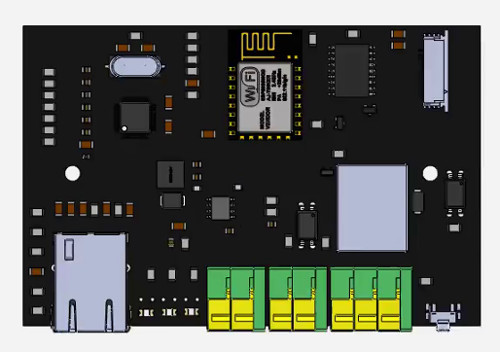
Процессор
| CPU |
Octa-core ARM Cortex-A55 @1.8GHz |
| RAM |
2GB LPDDR4/LPDDR4x |
| NAND |
1GB |
| Кодировщик |
H264 |
NPU
| Производительность NPU |
4 TOPS пиковая производительность (int8) |
| Время обработки NPU |
~500ms (Yolo V8 Coco) |
IMU
| IMU |
Синхронизирован с сенсорами камеры |
| Гироскоп |
FSR 2000dps / Частота вывода данных 200Hz |
| Акселерометр |
FSR ±2g / Частота вывода данных 200Hz |
| Датчик температуры |
Диапазон -40 +85 / 16-битный АЦП / Частота вывода данных 200Hz |
Интерфейсы
| Сеть (Проводная) |
10/100/1000BASE-T |
| Сеть (Беспроводная) |
802.11ax (Wi-Fi6) |
| RS-485 |
9600 … 115200 bps |
| CanBus |
10 … 500 kbps |
Программное обеспечение
| Библиотеки с открытым исходным кодом |
NumPy, OpenCV4, ... |
| Программирование через браузер |
Firefox, Chrome, Edge... |
| API |
Python |
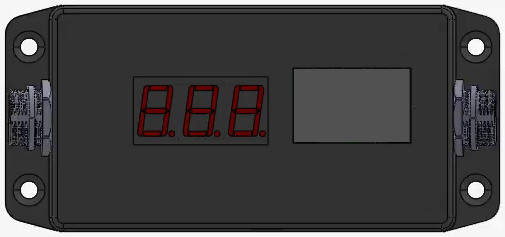
Механика
| Рабочая температура |
0°C ~ 45°C |
| Габариты / Материал |
3.5x10x11.9см / Алюминий |
| Крепление |
M4-8 x2 |
Для получения дополнительной информации проверьте:
Основные характеристики:  3D-измерения
3D-измерения Обнаружение объектов с помощью 3D-позиционирования
Обнаружение объектов с помощью 3D-позиционирования Открытый исходный код Python SDK
Открытый исходный код Python SDK Промышленное решение для сложных задач
Промышленное решение для сложных задач Простая интеграция, быстрая адаптация
Простая интеграция, быстрая адаптация Без внешнего оборудования
Без внешнего оборудования