Введение
Robotic Ai Vision (RAiV) - это высокоинтегрированная стереокамера. RAiV способна выполнять 3D-измерения, выполнять 3D-автоматизацию и осуществлять 3D-контроль качества. RAiV предназначен для использования на заводах и в мастерских. Это руководство содержит информацию о том, как использовать RAiV и его функции.
Основные функции
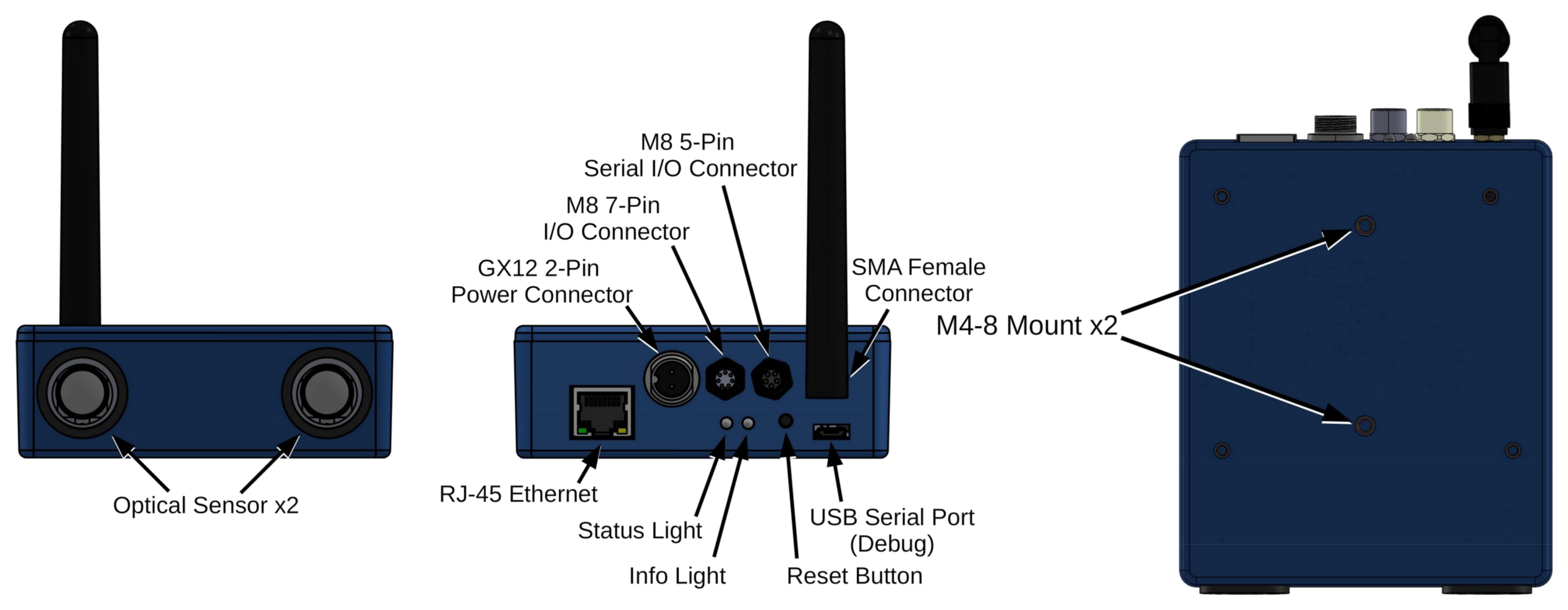
RAiV разработан как гибкая многоцелевая система видеонаблюдения. Его можно использовать с промышленными роботами, системами автоматизации, беспилотными наземными транспортными средствами и другими приложениями для 3D-съемки. В результате RAiV имеет различные интерфейсы передачи данных, такие как GigE, WiFi6, CanBus, RS-485, и сигнальные интерфейсы, такие как PWM и ввод-вывод общего назначения.
Расположение электрических и механических разъемов можно увидеть на изображении ниже:
Конвейер передачи данных
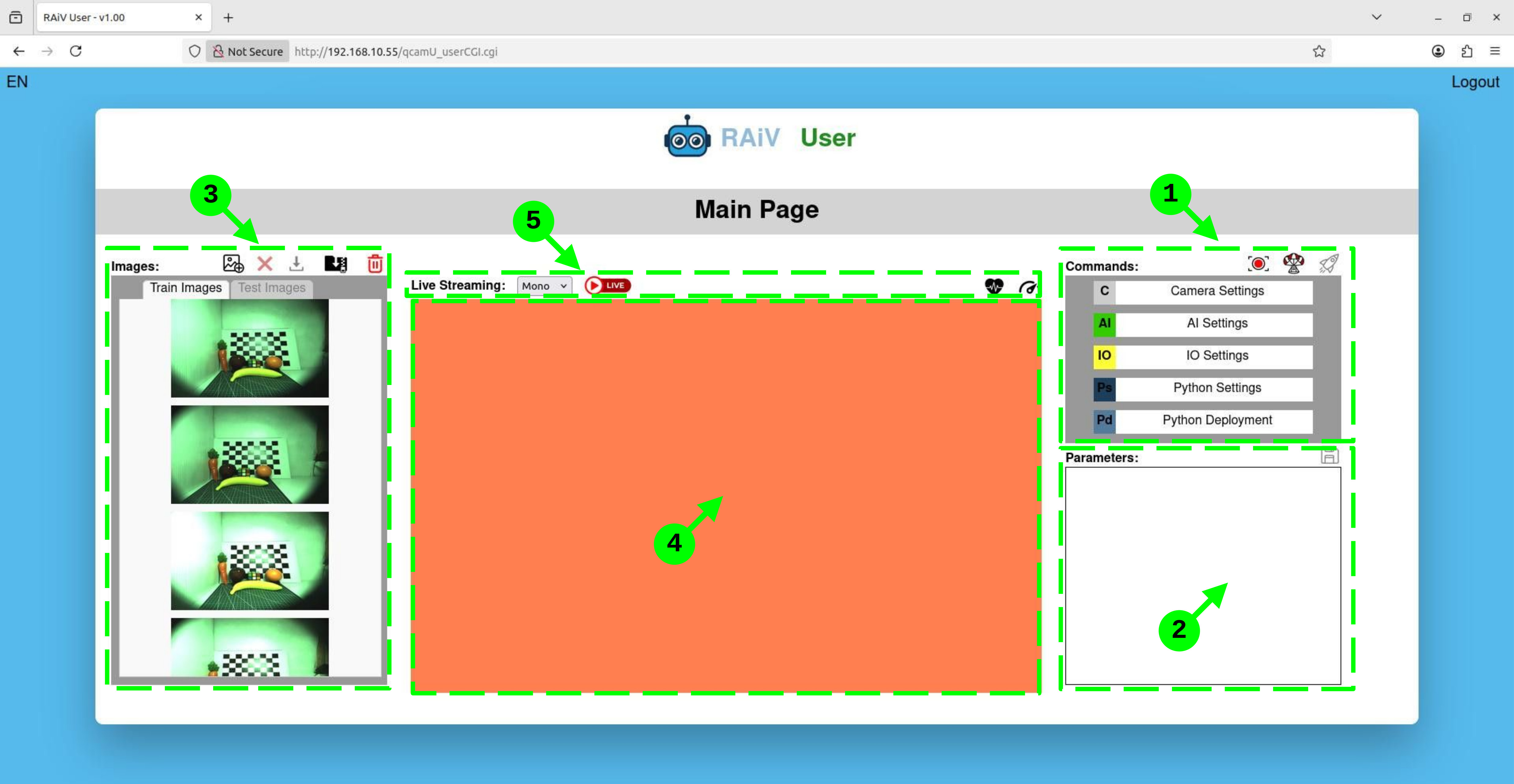
Одной из основных программных особенностей RAiV является то, что пользователи могут загружать в RAiV свои собственные коды на python. Загружая пользовательские коды на python, пользователь может реализовать желаемую функциональность. RAiV проверяет загруженные коды на python и запускает их в изолированной среде.
Пользовательский код на python выполняется непрерывно. Код может получать полученные IMU-сэмплы, стереоизображения и выходные данные модели нейронной сети в любое время. RAiV имеет следующий конвейер передачи данных:
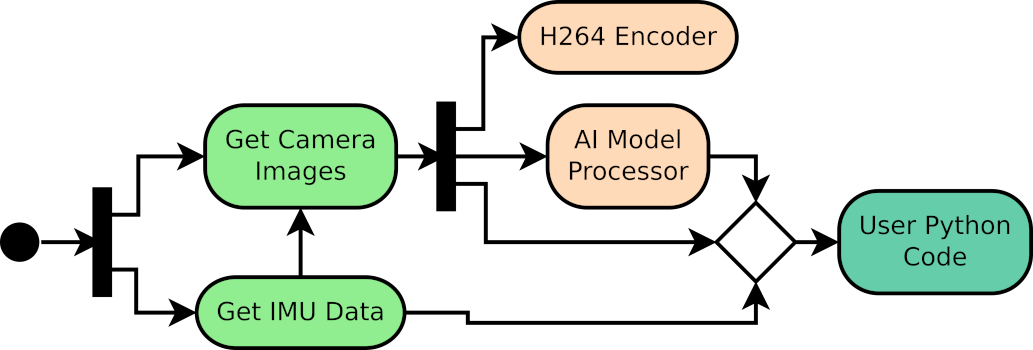
Для получения дополнительной информации, пожалуйста, ознакомьтесь со страницей технических подробностей в Robotic Ai Vision (RAiV) и нашем блоге