Giriş
Robotik Yapay Zeka Görüşü (RAiV), yüksek düzeyde entegre bir stereo kameradır. RAiV, 3 boyutlu ölçümler alabilir, 3 boyutlu otomasyon yapabilir ve 3 boyutlu kalite kontrolü gerçekleştirebilir. RAiV, fabrika/atölye alanlarında kullanılmak üzere tasarlanmıştır. Bu kılavuz, RAiV'in nasıl kullanılacağı ve özelliklerine ilişkin bilgiler sunmaktadır.
Ana Özellikler
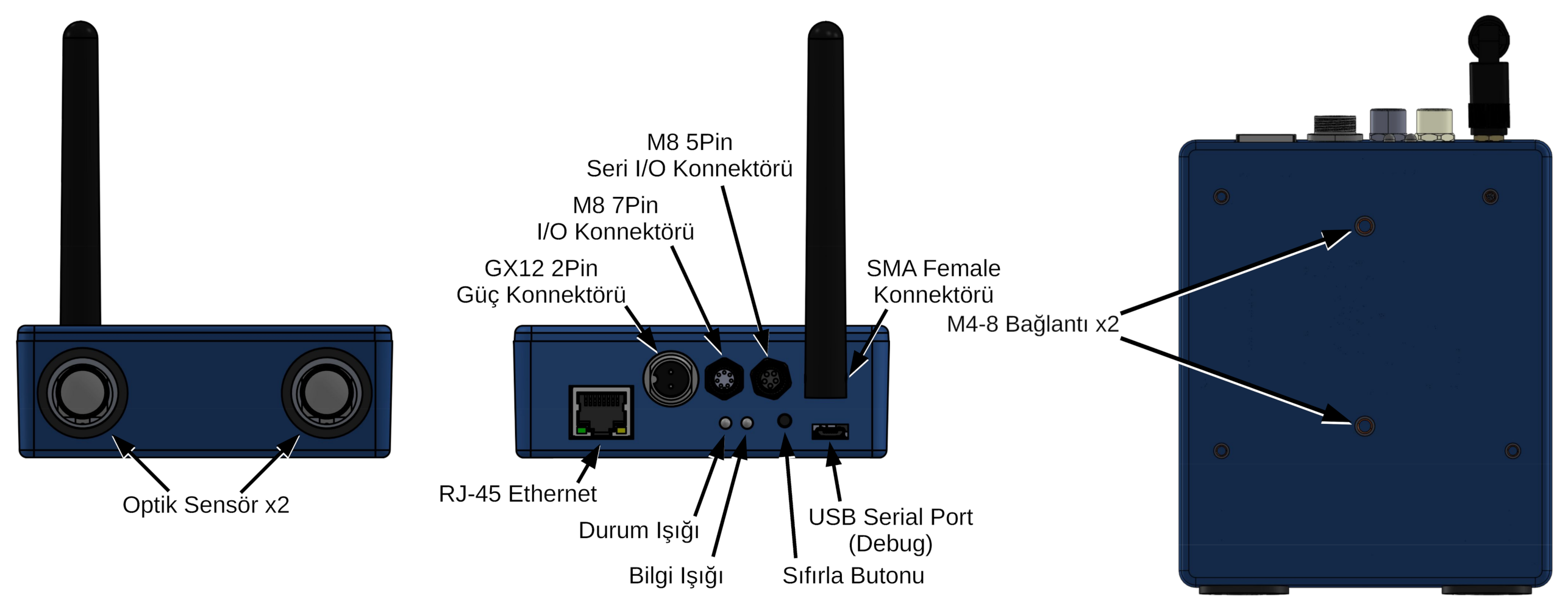
RAiV, esnek çok amaçlı bir kamera sistemi olarak tasarlanmıştır. Endüstriyel robotlar, otomasyon sistemleri, insansız kara araçları ve diğer 3 boyutlu görüntüleme gerektiren uygulamalarla kullanılabilir. RAiV, çeşitli uygulamalar için GigE, WiFi6, CanBus, RS-485 gibi veri arayüzlerine ve PWM ve genel amaçlı G/Ç gibi sinyal arayüzlerine sahiptir.
Aşağıdaki resimde elektrik ve mekanik bağlantı noktalarının konumları görülebilir:
Veri Hattı
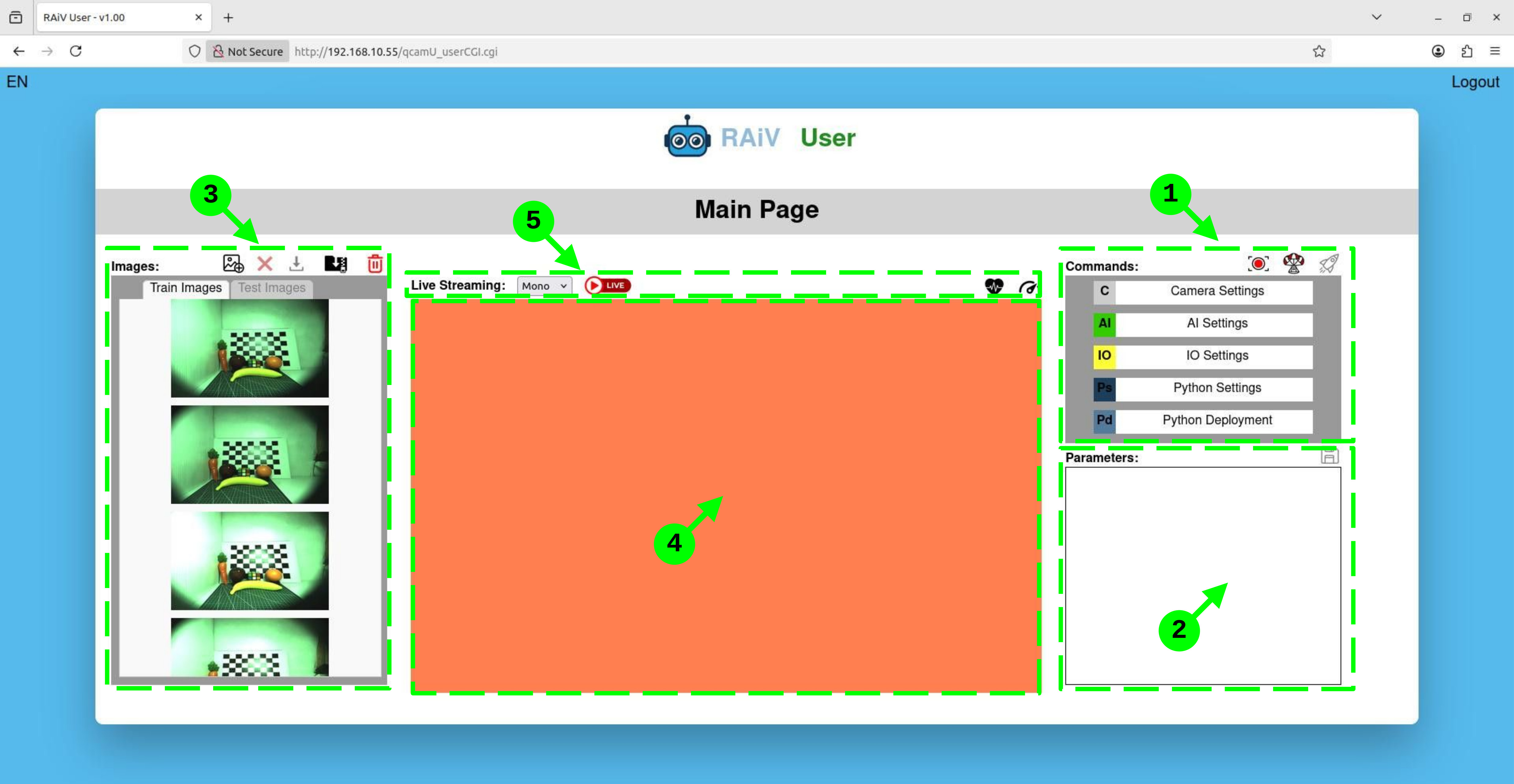
RAiV'in ana yazılım özelliklerinden biri, kullanıcıların kendi Python kodlarını RAiV'e yükleyebilmeleridir. Özel Python kodları yükleyerek, kullanıcı istediği işlevselliği uygulayabilir. RAiV, yüklenen Python kodlarını kontrol eder ve bunları korumalı ortamda çalıştırır.
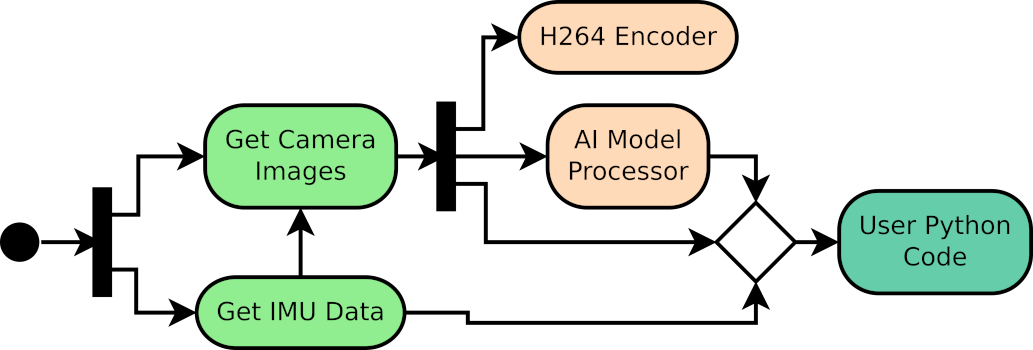
Kullanıcının Python kodu sürekli olarak yürütülür. Kod, veri hattından, elde edilen IMU örneklerini, stereo görüntüleri ve sinir ağı modeli çıktılarını her zaman alabilir. RAiV aşağıdaki veri hattına sahiptir:
Daha fazla bilgi için lütfen Robotic Ai Vision (RAiV) teknik detaylar sayfasına ve blogumuza bakın.