Robotic Ai Vision (RAiV)
Depth Sensing and 3D Localization
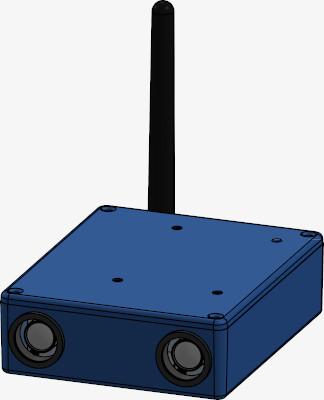
RAiV is stereo camera which combines 3D vision with a powerful onboard processors. It delivers depth sensing, object detection, heading estimation with open source software for robotics and automation applications. RAiV integrates a high-resolution stereo sensor, 6 DoF IMU, octa-core CPU, and a Google Edge TPU, providing immense processing power for 3D vision projects.
Electrical
Imaging
Processing
NPU
IMU
Connectivity
Software
Mechanical
| Power | 12/24VDC - 5W |
|---|---|
| GP I/O & PWM | Power VDC Level – 0.2A (total) |
| Resolution (RGB Bayer) | 1600x1300 Mono / 3200x1300 Stereo |
|---|---|
| Shutter Type | Global Shutter & Synchronized Across Sensors |
| FPS | 60 (max) |
| Lens / Mount / Focus | 2.8mm (default) … 25mm / S Mount / Manual |
| Baseline | 65mm |
| CPU | Octa-core ARM Cortex-A55 @1.8GHz |
|---|---|
| RAM | 2GB LPDDR4/LPDDR4x |
| NAND | 1GB |
| Encoder | H264 |
| NPU Throughput | 4 TOPS peak performance (int8) |
|---|---|
| NPU Processing Time | ~500ms (Yolo V8 Coco) |
| IMU | Synchronized with Imaging Sensors |
|---|---|
| Gyroscope | FSR 2000dps / Output Data Rate 200Hz |
| Accelerometer | FSR ±2g / Output Data Rate 200Hz |
| Temperature Sensor | Range -40 +85 / 16Bit ADC / Output Data Rate 200Hz |
| Network (Wired) | 10/100/1000BASE-T |
|---|---|
| Network (Wireless) | 802.11ax (Wi-Fi6) |
| RS-485 | 9600 … 115200 bps |
| CanBus | 10 … 500 kbps |
| Open Source Libraries | NumPy, OpenCV4, ... |
|---|---|
| Browser Based Programming | Firefox, Chrome, Edge... |
| API | Python |
| Operation Temperature | 0°C ~ 45°C |
|---|---|
| Dimensions / Material | 3.5x10x11.9cm / Aluminum |
| Mounting | M4-8 x2 |
For more information check:
 3D Measurement
3D Measurement Object Detection with 3D Position
Object Detection with 3D Position Open Source Python SDK
Open Source Python SDK Industrial Solution for Tough Problems
Industrial Solution for Tough Problems Easy Integration Quick Adaption
Easy Integration Quick Adaption No External Hardware
No External Hardware